camerart
Well-Known Member
Hi,
I'm using a PIC to READ BMP280 DATA. This chip measures Temperature and pressure, for e,g, weather.
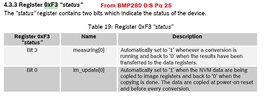
One of the registers is the STATUS reg, that has 2x BITs to check, '0' and '3'.
The D/S mentions the DATA registers, am I correct to think this means the BMP280 DATA registers?
Also 'The DATA are copied at power-on-reset and before every conversation. Does conversation mean when the chip is getting measurements, or sending to the PIC?
I'm puzzled about the exact timing of each of these BITs so if anyone can explain where these go in a program please.
I'm programming in BASIC, and if different programs use different timings, then just outline any information please.
Cheers. Camerart.
I'm using a PIC to READ BMP280 DATA. This chip measures Temperature and pressure, for e,g, weather.
One of the registers is the STATUS reg, that has 2x BITs to check, '0' and '3'.
The D/S mentions the DATA registers, am I correct to think this means the BMP280 DATA registers?
Also 'The DATA are copied at power-on-reset and before every conversation. Does conversation mean when the chip is getting measurements, or sending to the PIC?
I'm puzzled about the exact timing of each of these BITs so if anyone can explain where these go in a program please.
I'm programming in BASIC, and if different programs use different timings, then just outline any information please.
Cheers. Camerart.





 .. Shovels i'm quite at home with..
.. Shovels i'm quite at home with..
