MrDEB
Well-Known Member
planning on using a disected mouse (wheel type) to determine wind directon using a PIC.
basically an up down counter.
starting with this code
Swordfish Wiki | SwordfishUser / DialEncoder browse
idea is to just use the two photo detectors and wheel (not wanting to unless necessary re engineer using the IC that is in the mouse. just the two detectors for the one wheel. (other wheel will be used for wind speed detection)
Thinking but I know its not right
if B0=1,1,0 and B1 = 0,1,0 then CW
if B1=1,1,0 and B0=0,1,0 then CCW
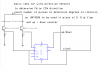
schemaic from another site
any suggestions?
oh yea the wheel will be driven at a 9 to one ratio (360 / 40(#of slots in wheel) which should add to accuracy . hopfully 1 degree
basically an up down counter.
starting with this code
Swordfish Wiki | SwordfishUser / DialEncoder browse
idea is to just use the two photo detectors and wheel (not wanting to unless necessary re engineer using the IC that is in the mouse. just the two detectors for the one wheel. (other wheel will be used for wind speed detection)
Thinking but I know its not right
if B0=1,1,0 and B1 = 0,1,0 then CW
if B1=1,1,0 and B0=0,1,0 then CCW
schemaic from another site
any suggestions?
oh yea the wheel will be driven at a 9 to one ratio (360 / 40(#of slots in wheel) which should add to accuracy . hopfully 1 degree