;*******************************************************************
; 16F877 PWM Program
;*******************************************************************
include "p16f877.inc"
errorlevel -302
radix dec
__CONFIG _CP_OFF & _DEBUG_ON & _WDT_OFF & _BODEN_OFF & _PWRTE_ON & _HS_OSC & _LVP_OFF & _CPD_OFF
cblock 20h
OnTime:2
OffTime:2
endc
cblock 71h
int_work
int_status
int_pclath
endc
org 0h
nop
goto start
nop
nop
org 04h
interrupt movwf int_work
swapf STATUS,W
movwf int_status
bcf STATUS,RP0
bcf STATUS,RP1
movfw PCLATH
movwf int_pclath
clrf PCLATH
btfsc PORTB,0
goto TurnOff
; turn on the output and write the on time
nop; delay to make both path identical
bsf PORTB,0
bsf PORTB,1;<<<<<<<<<< Break Point
movfw OnTime+1
movwf CCPR1H
movfw OnTime
movwf CCPR1L
goto DonePWM
TurnOff bcf PORTB,0
bcf PORTB,1;<<<<<<<<<< Break Point
movfw OffTime+1
movwf CCPR1H
movfw OffTime
movwf CCPR1L
DonePWM
bcf PIR1,CCP1IF; reset special event trigger interupt
movfw int_pclath
movwf PCLATH
swapf int_status,W
movwf STATUS
swapf int_work,F; swap to file
swapf int_work,W; swap to work
retfie
start bsf STATUS,RP0
bcf STATUS,RP1
bsf STATUS,IRP; all indirest access is to 100h - 1ffh
movlw (0<<NOT_RBPU|0<<INTEDG|0<<T0CS|0<<T0SE|0<<PSA|B'000'<<PS0)
movwf OPTION_REG
movlw b'11111100'
movwf TRISB
bcf STATUS,RP0
movlw (b'01'<<T1CKPS0|0<<T1OSCEN|0<<NOT_T1SYNC|0<<TMR1CS|1<<TMR1ON)
movwf T1CON; enable timer 1
movlw low(5000)
movwf CCPR1L
movwf OnTime
movlw high(5000)
movwf CCPR1H
movwf OnTime+1
movlw low(45000)
movwf OffTime
movlw high(45000)
movwf OffTime+1
movlw (0<<CCP1X|0<<CCP1Y|b'1011'<<CCP1M0); enable special event trigger on CCP1
movwf CCP1CON;
bsf STATUS,RP0
bsf PIE1,CCP1IE; enable CCP1 interupt
bcf STATUS,RP0
movlw (1<<GIE|1<<PEIE|0<<T0IE|0<<INTE|0<<RBIE|0<<T0IF|0<<INTF|0<<RBIF)
movwf INTCON; enable Peripheral interupts
Loop
goto Loop
END


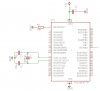
") See attachement if interested in my diagram.
See attachement if interested in my diagram. 
 .
.