Electro Tech is an online community (with over 170,000 members) who enjoy talking about and building electronic circuits, projects and gadgets. To participate you need to register. Registration is free. Click here to register now.
Welcome to our site! Electro Tech is an online community (with over 170,000 members) who enjoy talking about and building electronic circuits, projects and gadgets. To participate you need to register. Registration is free. Click here to register now.
Hello everyone,
I am not a pro electrical and this might be a simple question.
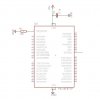
Is placing 2 capacitor 0.1uf necessary between Vdd and ground?
Q1> If yes why?
Q2> If yes shall i place 1 or 2 capacitors?
See attachment to understand more.
we definitely Thank you as you are rehearsing our knowledge.
1. YES, the cap is necessary to bypass all the electrical HF activity created by the chip, thus preventing noise on the Vdd line.
2 One would do if you are shorting the lines across the chip as they are on either side of the chip. If independently fed, better have two caps.
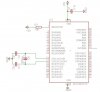
This circuit will be used for driving a servo motor. Many of you already know this See attachement if interested in my diagram.
Prior driving a servo motor, I am interested in testing it using Oscilloscope. Therefore, I connected RB0 to oscilloscope to see 2ms on time and 18ms off time. My problem I don’t read anything from the oscilloscope anyone knows why?
The codes are here
Code:
;*******************************************************************
; 16F877 PWM Program
;*******************************************************************
include "p16f877.inc"
errorlevel -302
radix dec
__CONFIG _CP_OFF & _DEBUG_ON & _WDT_OFF & _BODEN_OFF & _PWRTE_ON & _HS_OSC & _LVP_OFF & _CPD_OFF
cblock 20h
OnTime:2
OffTime:2
endc
cblock 71h
int_work
int_status
int_pclath
endc
org 0h
nop
goto start
nop
nop
org 04h
interrupt movwf int_work
swapf STATUS,W
movwf int_status
bcf STATUS,RP0
bcf STATUS,RP1
movfw PCLATH
movwf int_pclath
clrf PCLATH
btfsc PORTB,0
goto TurnOff
; turn on the output and write the on time
nop; delay to make both path identical
bsf PORTB,0;<<<<<<<<<< Break Point
movfw OnTime+1
movwf CCPR1H
movfw OnTime
movwf CCPR1L
goto DonePWM
TurnOff bcf PORTB,0;<<<<<<<<<< Break Point
movfw OffTime+1
movwf CCPR1H
movfw OffTime
movwf CCPR1L
DonePWM
bcf PIR1,CCP1IF; reset special event trigger interupt
movfw int_pclath
movwf PCLATH
swapf int_status,W
movwf STATUS
swapf int_work,F; swap to file
swapf int_work,W; swap to work
retfie
start bsf STATUS,RP0
bcf STATUS,RP1
bsf STATUS,IRP; all indirest access is to 100h - 1ffh
movlw (0<<NOT_RBPU|0<<INTEDG|0<<T0CS|0<<T0SE|0<<PSA|B'000'<<PS0)
movwf OPTION_REG
movlw b'11111110'
movwf TRISB
bcf STATUS,RP0
movlw (b'01'<<T1CKPS0|0<<T1OSCEN|0<<NOT_T1SYNC|0<<TMR1CS|1<<TMR1ON)
movwf T1CON; enable timer 1
movlw low(5000)
movwf CCPR1L
movwf OnTime
movlw high(5000)
movwf CCPR1H
movwf OnTime+1
movlw low(45000)
movwf OffTime
movlw high(45000)
movwf OffTime+1
movlw (0<<CCP1X|0<<CCP1Y|b'1011'<<CCP1M0); enable special event trigger on CCP1
movwf CCP1CON;
bsf STATUS,RP0
bsf PIE1,CCP1IE; enable CCP1 interupt
bcf STATUS,RP0
movlw (1<<GIE|1<<PEIE|0<<T0IE|0<<INTE|0<<RBIE|0<<T0IF|0<<INTF|0<<RBIF)
movwf INTCON; enable Peripheral interupts
Loop
goto Loop
END
I start a new thread here because the title matches the problem I used to ask this in a thread called 16F818 which causes alot of confusion. Now the title matches the problem I hope no more confusion.
You don't set the clock speed anywhere, you write the code to use the clock speed you choose. In particular the delay routines in the posted code need to be written specifically for the clock speed - and if generated by the PICList delay code generator you have to input the clock speed.
You don't set the clock speed anywhere, you write the code to use the clock speed you choose. In particular the delay routines in the posted code need to be written specifically for the clock speed - and if generated by the PICList delay code generator you have to input the clock speed.
I did it with a PIC delay generator and specified the 20Mhz frequency value.
My question is how I can tell the PIC that I am using 20MHz internal crystal?
OMG, I think what is going wrong PIC16F877 doesn't have an internal clock! I see why the servo didn't rotate. Tommorrow I will go get 20Mhz oscillator. What a discovery .
I did it with a PIC delay generator and specified the 20Mhz frequency value.
My question is how I can tell the PIC that I am using 20MHz internal crystal?
OMG, I think what is going wrong PIC16F877 doesn't have an internal clock! I see why the servo didn't rotate. Tommorrow I will go get 20Mhz oscillator. What a discovery .
Q> These codes are taking the motor to one direction suppose after 2second I want it to shift or go to other direction? How can I do this using Interrputs?
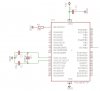
Here is my new diagram I only added 20Mhz crystal and 2X22pf capacitor, I am trying to control a servo motor from pin RB0 of the PIC16F877. Nothing happen, You think my diagram is wrong? or the codes? I posted already?
Here is my new diagram I only added 20Mhz crystal and 2X22pf capacitor, I am trying to control a servo motor from pin RB0 of the PIC16F877. Nothing happen, You think my diagram is wrong? or the codes? I posted already?
You have a pulldown on MCLR. That's backward. Put a pullup - the resistor should connect to VCC/5V.
That might work as long as the programmer is connected, overriding the pulldown, but the second you disconnect it the PIC is in RESET. Nothing happens while in reset. MCLR must go high for the chip to run.
This site uses cookies to help personalise content, tailor your experience and to keep you logged in if you register.
By continuing to use this site, you are consenting to our use of cookies.


") See attachement if interested in my diagram.
See attachement if interested in my diagram.