forrestking
New Member
Hello, I'm new! I'm working on a project and have hit a snag. Presently my only alternative is to create a mechanical mixer to move the cart described below. I appreciate you guys looking at this and will let you knwo how it turns out either way.
I am building a remote controlled electric cart based on an electric wheelchair.
The wheelchair control box contains all of the parts to monitor and charge the batteries while controlling the speed and direction of the wheelcahir motors.
The wheelchair uses a joystick for input. The joystick is a Penny & Giles JC200. ( I have located the spec sheet and downloaded it.) It is connected to the brains of the computer by 5 wires:
red: 12V positive
Green: center tap
Black:" zero voltage supply"
Blue: x-axis output voltage signal
Yellow: Y-axis output voltage signal
Rather than have a servo mechanically move the joystick, I want to remove the joystick and replace it with a non-mechanical interface that connects to a Futaba R/C receiver.
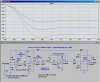
The problem I 'm having is finding a way to change the Pulses that come from the Receiver's output into the correct voltage to replace the joystick.
The Futaba Receiver's signal is a square pulse with 0V and 5V levels. The high length of the pulse determines the stick position, 1ms being one extreme, 2ms the other extreme and 1.5ms the center. The time between two rising edges is 20ms.
Do you have any ideas what I could use to convert the Pulses to the corect output voltage?
Here is the link to the existing joystick controller - this is what I am trying to replace: **broken link removed**
I am building a remote controlled electric cart based on an electric wheelchair.
The wheelchair control box contains all of the parts to monitor and charge the batteries while controlling the speed and direction of the wheelcahir motors.
The wheelchair uses a joystick for input. The joystick is a Penny & Giles JC200. ( I have located the spec sheet and downloaded it.) It is connected to the brains of the computer by 5 wires:
red: 12V positive
Green: center tap
Black:" zero voltage supply"
Blue: x-axis output voltage signal
Yellow: Y-axis output voltage signal
Rather than have a servo mechanically move the joystick, I want to remove the joystick and replace it with a non-mechanical interface that connects to a Futaba R/C receiver.
The problem I 'm having is finding a way to change the Pulses that come from the Receiver's output into the correct voltage to replace the joystick.
The Futaba Receiver's signal is a square pulse with 0V and 5V levels. The high length of the pulse determines the stick position, 1ms being one extreme, 2ms the other extreme and 1.5ms the center. The time between two rising edges is 20ms.
Do you have any ideas what I could use to convert the Pulses to the corect output voltage?
Here is the link to the existing joystick controller - this is what I am trying to replace: **broken link removed**