lloydi12345
Member
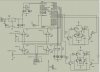
I have two PCBs. PCB1 contains PIC, Comparator and hbridge. PCB2 contains the IR LEDs and IR receiver modules. The first sensor is located at front, 2nd at left side of the mobile car and 3rd at the right side. I would like first to try it on flashing LEDs on the PIC before giving it a try on the motors. When an obstacle is detected in front, the 2nd LED will light. If an obstacle is detected on left, the 1st LED will light. If an obstacle is detected on right, the 3rd LED will light. I am having problems in using in the sensor part. The 1st sensor doesn't make the 2nd LED light even if I place an obstacle. Left sensor and right sensor works very well without any problems. The 3 IR receiver modules are different from each other that's why the schematic for each IR receiver module is different.
When I try PCB2 disconnecting from PCB1 and try PCB2 on a breadboard with only LM324 and variable resistor. The output of LM324 is connected to a visible LED to show that there is an obstacle detected. On if there's no obstacle and Off if there's an obstacle. The sensors are not having any problems at all. The 3 sensors function well. Is it possible to have problems with my program code?
Here's my source code:
When I try PCB2 disconnecting from PCB1 and try PCB2 on a breadboard with only LM324 and variable resistor. The output of LM324 is connected to a visible LED to show that there is an obstacle detected. On if there's no obstacle and Off if there's an obstacle. The sensors are not having any problems at all. The 3 sensors function well. Is it possible to have problems with my program code?
Here's my source code:
Code:
list p=16f877A ; list directive to define processor
#include <p16f877A.inc> ; processor specific variable definitions
__CONFIG _CP_OFF & _WDT_OFF & _BODEN_OFF & _PWRTE_ON & _XT_OSC & _WRT_OFF & _LVP_OFF & _CPD_OFF
CBLOCK 0x21
FIRST
SECOND
THIRD
ENDC
ORG 0x000
goto main ; go to beginning of program
ORG 0x004
; isr code can go here
main
BANKSEL TRISC
MOVLW 0x00
MOVWF TRISC
MOVLW 0XFF ;RB inputs (RB4-RB7 are the only port bits used as input)
MOVWF TRISB
BANKSEL PORTC
FORWARD:
MOVLW B'00000001'
MOVWF PORTC
CALL DELAYY
MOVLW B'00000010'
MOVWF PORTC
CALL DELAYY
MOVLW B'00000100'
MOVWF PORTC
CALL DELAYY
MOVLW B'00000101'
MOVWF PORTC
CALL DELAYY
MOVLW B'00000110'
MOVWF PORTC
CALL DELAYY
MOVLW B'00000111'
MOVWF PORTC
CALL DELAYY
MOVLW B'00000000'
MOVWF PORTC
CALL DELAYY
MOVLW B'00000111'
MOVWF PORTC
CALL DELAYY
MOVE:
BTFSS PORTB, 4
GOTO SENSOR0
GOTO SENSOR1
SENSOR0:
BTFSS PORTB, 5
GOTO SENSOR00
GOTO SENSOR01
SENSOR00:
BTFSS PORTB, 6
GOTO SENSOR000
GOTO SENSOR001
SENSOR01:
BTFSS PORTB, 6
GOTO SENSOR010
GOTO SENSOR011
SENSOR1:
BTFSS PORTB, 5
GOTO SENSOR10
GOTO SENSOR11
SENSOR10:
BTFSS PORTB, 6
GOTO SENSOR100
GOTO SENSOR101
SENSOR11:
BTFSS PORTB, 6
GOTO SENSOR110
GOTO SENSOR111
SENSOR000:
MOVLW B'00000111'
MOVWF PORTC
CALL DELAYY
GOTO MOVE
SENSOR001:
MOVLW B'00000011'
MOVWF PORTC
CALL DELAYY
GOTO MOVE
SENSOR010:
MOVLW B'00000110'
MOVWF PORTC
CALL DELAYY
GOTO MOVE
SENSOR011:
MOVLW B'00000010'
MOVWF PORTC
CALL DELAYY
GOTO MOVE
SENSOR100:
MOVLW B'00000101'
MOVWF PORTC
CALL DELAYY
GOTO MOVE
SENSOR101:
MOVLW B'00000001'
MOVWF PORTC
CALL DELAYY
GOTO MOVE
SENSOR110:
MOVLW B'00000100'
MOVWF PORTC
CALL DELAYY
GOTO MOVE
SENSOR111:
MOVLW B'00000000'
MOVWF PORTC
CALL DELAYY
GOTO MOVE
DELAY: ; 1 second delay
MOVLW .2
MOVWF THIRD
LOOP_1_SEC:
MOVLW .250
MOVWF SECOND
LOOP_125_MS:
MOVLW .250
MOVWF FIRST
LOOP_.5_MS:
NOP
DECFSZ FIRST,F
GOTO LOOP_.5_MS
DECFSZ SECOND,F
GOTO LOOP_125_MS
DECFSZ THIRD,F
GOTO LOOP_1_SEC
return
DELAYY:
MOVLW .2
MOVWF THIRD
LOOP_1_SECC:
MOVLW .200
MOVWF SECOND
LOOP_125_MSS:
MOVLW .200
MOVWF FIRST
LOOP_.5_MSS:
NOP
DECFSZ FIRST,F
GOTO LOOP_.5_MSS
DECFSZ SECOND,F
GOTO LOOP_125_MSS
DECFSZ THIRD,F
GOTO LOOP_1_SECC
return
ENDAttachments

Last edited:
