Continue to Site
Follow along with the video below to see how to install our site as a web app on your home screen.
Note: This feature may not be available in some browsers.
XC8 is free (limited ) and covers all 8 bit pics.....XC16 and XC32 are also free (limited )..Hi Tech C? What did you shell out USD 3K for it did you? I thought the FREE version did not handle the 16F series PICs. MikroC is a good buy for USD 249. I was tempted to purchase Hi Tech many years back on eBay... Too rich for me. Although I did pay AUD 1,500 for circuit maker 2000, and a couple of grand for QuarkXPress... But back in those days I had money. Now I am as poor as an ****-house rat.
No point me posting MikroC code since you are running Hi Tech. Otherwise I would help you out brother...
Hello,
i am watching but need to understand it more clearly!
An Australian that would like to help!!!Who is this MCU88888??
I want to contribute some complete fully working projects to the forum. Do you have an special place to submit them?An Australian that would like to help!!!
The Article section is for posting this kind of stuff... I have a few articles as does a few other members... Have a look and see...I want to contribute some complete fully working projects to the forum. Do you have an special place to submit them?
My projects come with:
- Schematics (Protel / Circuit Maker 2000)
- Monochrome Artwork
- PCBs (single sided PDF)
- Raw Documentation
- MikroC Source Code & Hex File (I am running an registered version of MikroC, but I try to keep it under 2KB)
But programming skill are little bit difficult!All we've been through!!! I thought you would be a professional by now... What would you like me to explain!
Arh perfect! I'll give you fresh projects that are not on the Internet already. I have an CMOS 4000 IC tester in the brew. Just waiting on ZIF sockets to come from China before I can throw something tangible together on an PCB.The Article section is for posting this kind of stuff... I have a few articles as does a few other members... Have a look and see...
https://www.electro-tech-online.com/articles/
Yes it takes years to become good at it... It is not simple... I have 10-years experience dealing with algorithms...But programming skill are little bit difficult!
char E_Write(int addr, unsigned char* ch, char len)
{
I2C_Start(); // Send a start condition
I2C_Write(WRITE); // chip write address
if(!I2C_nack()) return 0; // wait for ack
if(WRITE == 0xA0)
{
I2C_Write((unsigned char)( addr >> 8 & 0xff));// Not used if out if single byte address
if(!I2C_nack()) return 0; // wait for ack
}
if(!(WRITE==0x90))
{
I2C_Write((unsigned char) addr & 0xff); // low address (ADC not used)
if(!I2C_nack()) return 0; // wait for ack
}
if(len == 1)
{
I2C_Write(*ch);
if(!I2C_nack()) return 0;
}
else if(len > 1)
{
while(len--)
{
I2C_Write(*ch++); // Write values to Eeprom
if(!I2C_nack()) return 0;
}
}
else
{
while(*ch != 0)
{
I2C_Write(*ch++); // Write values to Eeprom
if(!I2C_nack()) return 0;
}
I2C_Write(0); // Write values to Eeprom
if(!I2C_nack()) return 0;
}
I2C_Stop(); // Send a stop.
return 1; // All went well
}#include <htc.h>
__CONFIG(LVP_OFF & BOREN_OFF & PWRTE_ON & WDTE_OFF & FOSC_HS);
#define _XTAL_FREQ 20000000
#define SDATA RC4
#define SCLK RC3
void I2C_init(),I2C_start(void),I2C_write(char x), I2cSTOP(void);
void i2c_Wait(void);
void main(void){
TRISC3=1; //direction to input have be changed
TRISC4=1;
TRISC0=0;
TRISB=0X00;
TRISC1=0;
TRISC2=0;
RC0=0;
RC1=0;
RC2=0;
//__delay_ms(500);
I2C_init();
//__delay_ms(50);
// I2C_start();
//
// I2C_write(0x12);//esc default addr
//I2C_write(100);//testing speed 0-255
// I2cSTOP();
while(1){
RB0=0;
RC1=0;
RB7=0;
//__delay_ms(500);
RB0=1;
RC1=1;
RB7=1;
//__delay_ms(500);
}
}
void I2C_init(void)
{
SSPCON = 0x38; // set I2C master mode
SSPCON2 = 0x00;
SSPADD = 0x0C; //400KHZ 20MHz xtal
SSPSTAT|=0X80;
PSPIF=0; // clear SSPIF interrupt flag
BCLIF=0; // clear bus collision flag
}
void I2C_start(void)
{
i2c_Wait();
SEN=1;
}
void I2C_write(char x){
i2c_Wait();
SSPBUF=x;
}
void i2c_Wait(void){
while((SSPCON2 & 0X1F || (SSPSTAT & 0X04)));
}
void I2cSTOP(void)
{
i2c_Wait();
PEN=1;
}Ok, i will do it it has more advantages?of XC8 lite
/*
* PROJECT:
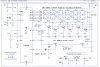
< LED 6-digit 24 / 12hr Clock >
Copyright ©2011 Trent Jackson all rights reserved
* MCU:
PIC16F628a @4MHz
* Compiler:
mikro PRO C ...
* Revision:
0.1b (conforms to hardware revision 0.1b and above)
* Status:
Working & complete
Compiler Messages:
Available RAM: 208 [bytes], Available ROM: 2048 [bytes]
Used RAM (bytes): 25 (12%) Free RAM (bytes): 183 (88%)
Used ROM (program words): 660 (32%) Free ROM (program words): 1388 (68%)
Project Linked Successfully clock.mcppi
Linked in 657 ms
Project 'clock.mcppi' completed: 2032 ms
Finished successfully: 12 Apr 2011, 12:18:55 clock.mcppi
*/
// :: Global Scope Variables ::
unsigned short digitSc = 0; // Digit num (1 of 6) in current multiplex scope
unsigned short hrsOnes = 2; // Hours LSD (least significant digit)
unsigned short hrsTens = 1; // Hours MSD (most significant digit)
unsigned short minOnes = 0; // Minutes LSD
unsigned short minTens = 0; // Minutes MSD
unsigned short secOnes = 0; // Seconds LSD
unsigned short secTens = 0; // Seconds MSD
unsigned short userSet = 0; // Flag set true when user is adjusting time
unsigned short dgToSet = 0; // Current set of digits in scope of adjustment
unsigned short tScaler = 0; // Time scaler to derive seconds from mS
unsigned int flDgHrs = 0; // Flash hours digits when being adjusted
unsigned int flDgMin = 0; // ^^ Minutes
unsigned int flDgSec = 0; // ^^ Seconds
unsigned int dBounce = 0; // De-bounce switch (timeout period no polling)
// :: Defines ::
// Segments on displays ...
#define segA PORTB.F0
#define segB PORTB.F1
#define segC PORTB.F2
#define segD PORTB.F3
#define segE PORTB.F4
#define segF PORTB.F5
#define segG PORTB.F6
// User-defined 12 or 24hr mode operation ...
#define mode PORTB.F7
// Control lines to 4017 decade counter for display multiplexing
#define mclr PORTA.F0
#define clkc PORTA.F1
// Switch lines (set / inc switches for time adjustment) ...
#define cSet PORTA.F2
#define cInc PORTA.F3
// :: Methods ::
/*
Tables containing segment settings corresponding to numbers for displays
*/
void num0()
{
segA = 1;
segB = 1;
segC = 1;
segD = 1;
segE = 1;
segF = 1;
segG = 0;
}
void num1()
{
segA = 0;
segB = 1;
segC = 1;
segD = 0;
segE = 0;
segF = 0;
segG = 0;
}
void num2()
{
segA = 1;
segB = 1;
segC = 0;
segG = 1;
segD = 1;
segE = 1;
segF = 0;
}
void num3()
{
segA = 1;
segB = 1;
segC = 1;
segD = 1;
segE = 0;
segF = 0;
segG = 1;
}
void num4()
{
segA = 0;
segD = 0;
segE = 0;
segF = 1;
segG = 1;
segB = 1;
segC = 1;
}
void num5()
{
segA = 1;
segB = 0;
segE = 0;
segF = 1;
segG = 1;
segC = 1;
segD = 1;
}
void num6()
{
segA = 1;
segB = 0;
segC = 1;
segD = 1;
segE = 1;
segF = 1;
segG = 1;
}
void num7()
{
segA = 1;
segB = 1;
segC = 1;
segD = 0;
segE = 0;
segF = 0;
segG = 0;
}
void num8()
{
segA = 1;
segB = 1;
segC = 1;
segD = 1;
segE = 1;
segF = 1;
segG = 1;
}
void num9()
{
segA = 1;
segB = 1;
segC = 1;
segD = 0;
segE = 0;
segF = 1;
segG = 1;
}
void blankDigit()
{
segA = 0;
segB = 0;
segC = 0;
segD = 0;
segE = 0;
segF = 0;
segG = 0;
}
void interrupt()
{
/*
Interrupt handler triggered by MCU's TMRO (pre-scaler enabled)
*/
// Inc scaler
tScaler ++;
// 1000mS / 1 sec of time elapsed?
if (tScaler == 121)
{
// Inc seconds if enabled
if (userSet == 0)
{
secOnes ++;
}
// Fine tune adj
delay_us(2);
// Reset scaler
tScaler = 0;
}
// 50uS before re-triggering interrupt
delay_us(50);
// Fine tune adj
delay_us(3);
// Re-enable and bail
TMR0 = 0;
INTCON = 0x20;
}
void setDigit(unsigned short digit)
{
/*
Apply data to current display digit in scope
Structure implements no "ELSE IF" logic enabling for a relatively
good equalization of execution time regardless of program flow. Program
memory is also preserved.
*/
if (digit == 0)
{
num0();
}
if (digit == 1)
{
num1();
}
if (digit == 2)
{
num2();
}
if (digit == 3)
{
num3();
}
if (digit == 4)
{
num4();
}
if (digit == 5)
{
num5();
}
if (digit == 6)
{
num6();
}
if (digit == 7)
{
num7();
}
if (digit == 8)
{
num8();
}
if (digit == 9)
{
num9();
}
}
flashDigits(unsigned int digits)
{
/*
Counter for flashing digits on / off when user is adjusting them
*/
digits ++; // Inc
// Counter reached targed? -- reset if so ...
if (digits == 5000)
{
digits = 0;
}
// Return current count to calling procedure
return digits;
}
void incCounter()
{
// Current display off ...
blankDigit();
// Clock decade counter (inc to next display)
clkc = 1;
clkc = 0;
}
void multiplexDisplays()
{
/*
1. Procedure applies data to current display digit in scope ...
2. Successive handling of the displays in an multiplexing fashion
Structure implements no "ELSE IF" logic between digit scanning, enabling
for a relatively good equalization of execution time, regardless of
program flow. Program memory is also preserved, and consistent scanning
frequencies are the end results
*/
// :: Hours Digit 1 ::
if (digitSc == 0)
{
if (flDgHrs < 2500)
{
// Lead zero blanking for 12hr mode ...
if (mode == 0 && hrsTens == 0)
{
blankDigit();
}
else
{
setDigit(hrsTens);
}
}
else
{
blankDigit();
}
}
// :: Hours Digit 2 ::
if (digitSc == 1)
{
if (flDgHrs < 2500)
{
setDigit(hrsOnes);
}
else
{
blankDigit();
}
}
// :: Minutes Digit 1 ::
if (digitSc == 2)
{
if (flDgMin < 2500)
{
setDigit(minTens);
}
else
{
blankDigit();
}
}
// :: Minutes Digit 2 ::
if (digitSc == 3)
{
if (flDgMin < 2500)
{
setDigit(minOnes);
}
else
{
blankDigit();
}
}
// :: Seconds Digit 1 ::
if (digitSc == 4)
{
if (flDgSec < 2500)
{
setDigit(secTens);
}
else
{
blankDigit();
}
}
// :: Seconds Digit 2 ::
if (digitSc == 5)
{
if (flDgSec < 2500)
{
setDigit(secOnes);
}
else
{
blankDigit();
}
}
// Next digit to apply to ...
digitSc++;
// Reset 'n start again if this is the final digit in the chain
if (digitSc == 6)
{
digitSc = 0;
}
}
void doTime()
{
/*
Handles the incrementing and control of all time-related variables
in either 12 or 24hr time
1. Seconds
2. Minutes
3. Hours ...
*/
// :: Seconds ::
if (secOnes == 10)
{
secTens ++; // Inc tens
secOnes = 0; // Reset ones
}
if (secTens == 6)
{
minOnes ++; // Inc / carry min ones
secTens = 0; // Reset tens
}
// :: Mins ... ::
if (minOnes == 10)
{
minTens ++; // Inc tens ...
minOnes = 0; // Reset ones
}
if (minTens == 6)
{
hrsOnes ++; // Inc / carry hour ones
minTens = 0; // Reset min tens
}
// :: Hours ... ::
if (hrsOnes == 10)
{
hrsTens ++; // Inc / carry tens
hrsOnes = 0; // Reset ones ...
}
// 12 or 24 mode in scope?
if (mode == 0)
{
// :: (12hr mode) ::
// 12 hrs elapsed? -- reset ones & tens ...
if (hrsTens == 1)
{
if (hrsOnes == 3)
{
hrsTens = 0;
hrsOnes = 1;
}
}
}
else // :: (24hr mode) ::
{
// 24 hrs elapsed? -- reset ones & tens ...
if (hrsTens == 2)
{
if (hrsOnes == 4)
{
hrsTens = 0;
hrsOnes = 0;
}
}
}
}
void doUser()
{
/*
Procedure handles the user adjusting the time via the 2
push button tactile switches ...
This proc renders the above proc out of scope until the
user has set all digits
*/
switch (dgToSet)
{
case 1: // :: Setting Hours ::
// Inc button pressed and enabled after debounce period?
if (dBounce == 0)
{
if (cInc == 0)
{
// Debounce switch contacts (ignore port for a short time)
dBounce = 1250;
// 12 or 24 mode in play?
if (mode == 0)
{
// (12hr mode) -- reset tens & ones if exceeded 12
if (hrsTens == 1)
{
if (hrsOnes == 2)
{
hrsTens = 0;
hrsOnes = 0;
}
}
}
else // (24hr mode) -- reset tens & ones if exceeded 24
{
// Reset tens & ones
if (hrsTens == 2)
{
if (hrsOnes == 4)
{
hrsTens = 0;
hrsOnes = 0;
}
}
}
// Inc ones?
if (Hrsones != 9)
{
hrsOnes ++;
}
else // Inc tens & reset ones
{
hrsTens ++;
hrsOnes =0;
}
}
}
// Call method to flash digits
flDgHrs = flashDigits(flDgHrs);
break;
case 2: // :: Setting Minutes ::
// Inc button pressed and enabled after debounce period?
if (dBounce == 0)
{
if (cInc == 0)
{
// Debounce switch contacts (ignore port for a short time)
dBounce = 1250;
// Reset tens & ones if exceeded 60
if (minTens == 5)
{
if (minOnes == 9)
{
minTens = 0;
minOnes = 0;
}
}
// Inc ones?
if (minOnes != 9)
{
minOnes ++;
}
else // Inc tens & reset ones
{
minTens ++;
minOnes =0;
}
}
}
// Call method to flash digits
flDgMin = flashDigits(flDgMin);
break;
case 3: // :: Setting Seconds ::
// Inc button pressed and enabled after debounce period?
if (dBounce == 0)
{
if (cInc == 0)
{
// Debounce switch contacts (ignore port for a short time)
dBounce = 1250;
// Reset tens & ones if exceeded 60
if (secTens == 5)
{
if (secOnes == 9)
{
secTens = 0;
secOnes = 0;
}
}
// Inc ones?
if (secOnes != 9)
{
secOnes ++;
}
else // Inc tens & reset ones
{
secTens ++;
secOnes =0;
}
}
}
// Call method to flash digits
flDgSec = flashDigits(flDgSec);
break;
case 4: // Exit adj time proc ...
userSet = 0;
dgToSet = 0;
break;
}
}
void main()
{
/*
Program entry point ... (as per usual with any C compiler)
*/
// Configuration of ports etc ...
CMCON = 7; // Disable analog comparators
TRISA = 0x0C; // 2 inputs rest outputs
TRISB = 0x00; // All outputs ...
PORTA = 0x00; // Init port, all pins low
PORTB = 0x00; // Init port, all pins low
OPTION_REG = 0x84; // assign prescaler to TMR0
TMR0 = 96; // initial TMR0 value
INTCON = 0xA0; // enable TMRO interrupt
// Reset decade counter & merger to main loop below ...
mclr = 1;
mclr = 0;
while(1)
{
// :: Infinite program loop :: //
// Display current digit ...
multiplexDisplays();
// Button allowed to be polled? / debounce period expired
if (dBounce == 0)
{
// Set button pressed?
if (cSet == 0)
{
userSet = 1; // Flag set denoting user is adjusting time ...
dgToSet ++; // Sec / min / hr digits in scope of being set
dBounce = 2500; // Set debounce period
// Reset specific variables:
flDgHrs = 0; // Flash hours digits
flDgMin = 0; // ^^ Minutes
flDgSec = 0; // ^^ Seconds
}
}
else
{
dBounce --; // Dec counter to re-enable key polling
}
// Run clock or user is setting new time:
if (userSet == 0)
{
doTime(); // Update clock ...
}
else
{
doUser(); // User is adjusting the time
}
// Next display digit in scope
incCounter();
}
}