EHTDesigner
New Member
I'm going to do a search on this question as I've seen some similar questions answered.
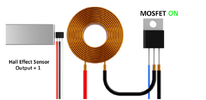
I'm starting a project that I've seen videos of and would like to make some changes to it for my purposes. It's an Electromagnetic Launcher. A photo of one of the coils is below. Let's say there would be 10 of these coils along a rail. There's a hall effect sensor that turns on a MOSFET energizing the coil when a magnet comes close to the hall effect sensor. The result is the field of the coil will pull the magnet towards the coil's center propelling the magnet forward. However once the magnet reaches the other side of the coil, the field present will pull the magnet back to the center of the coil, thus stopping the magnet from moving forward. What suggestions do you have to reverse the polarity to the coil when the magnet reaches the center of the coil? I was considering an H-Bridge but cant quite see how to use that in conjunction with the MOSFET. If I have 10 coils in a row, do I need 10 separate circuits or can there be a way to turn on power to the other coils. Power is on to the coil only when the magnet passes the hall effect sensors
I'm starting a project that I've seen videos of and would like to make some changes to it for my purposes. It's an Electromagnetic Launcher. A photo of one of the coils is below. Let's say there would be 10 of these coils along a rail. There's a hall effect sensor that turns on a MOSFET energizing the coil when a magnet comes close to the hall effect sensor. The result is the field of the coil will pull the magnet towards the coil's center propelling the magnet forward. However once the magnet reaches the other side of the coil, the field present will pull the magnet back to the center of the coil, thus stopping the magnet from moving forward. What suggestions do you have to reverse the polarity to the coil when the magnet reaches the center of the coil? I was considering an H-Bridge but cant quite see how to use that in conjunction with the MOSFET. If I have 10 coils in a row, do I need 10 separate circuits or can there be a way to turn on power to the other coils. Power is on to the coil only when the magnet passes the hall effect sensors