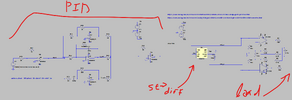
Hello ,I have built a PID controller which is connected to differential driver by the manuals below.
The PID is single ended while the driver is differential so I connected the two using converter.
The key component is the integrator.
I want that the driver to create a current on the load so It will be following the integrator output signal.
However as you can see that as integrator output rises the driver current saturated as some point .
Is there a way to fix the driver so it wont sature so quickly?
Ltspice files are attached.
https://www.analog.com/en/resources...ne-driver-receiver-design-guide-part-two.html
https://www.analog.com/en/resources...n-single-ended-to-differential-converter.html
The PID is single ended while the driver is differential so I connected the two using converter.
The key component is the integrator.
I want that the driver to create a current on the load so It will be following the integrator output signal.
However as you can see that as integrator output rises the driver current saturated as some point .
Is there a way to fix the driver so it wont sature so quickly?
Ltspice files are attached.
https://www.analog.com/en/resources...ne-driver-receiver-design-guide-part-two.html
https://www.analog.com/en/resources...n-single-ended-to-differential-converter.html