camerart
Well-Known Member
Hi,
I'm using AK8963C compass chips for use as direction findingmy projects.
Each of these chips need a BIAS calibration to correct errors, which is placed in any programs.
I use an application wirtten by YURI MAT (Not sure if that's correct) I think this link witll find it: https://github.com/YuriMat/
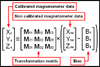
Here is the BIAS calibration calculation:
Here's an example of the 3x axis results, after calibration, also the calculated compass READing.
I would like to understand more, just how the 3xaxis work with each other, but as this is a bit complicated for me, I can only test out any examples, and try to follow.
Cheers, Camerart.
I'm using AK8963C compass chips for use as direction findingmy projects.
Each of these chips need a BIAS calibration to correct errors, which is placed in any programs.
I use an application wirtten by YURI MAT (Not sure if that's correct) I think this link witll find it: https://github.com/YuriMat/
Here is the BIAS calibration calculation:
Here's an example of the 3x axis results, after calibration, also the calculated compass READing.
I would like to understand more, just how the 3xaxis work with each other, but as this is a bit complicated for me, I can only test out any examples, and try to follow.
Cheers, Camerart.

") )
)

