I was thinking of using eg. output 0-3 for one phase and 5-8 for the other, with each block of outputs combined by diode-OR'ing them to give two signals each with 40% duty cycle.
Run the input clock at 10x the required bridge frequency.
Our module was designed to run a specific type of 12V AC air pump motor in a battery operated device and that works very well with 25% duty on each half, using outputs from a different counter and logic setup. If you are using it for anything visual that is probably too low a duty cycle, so I was trying to think of an alternate simple non-overlap drive with a somewhat better duty & the 4017 was the first thing I thought of.
See the photo for the power end of the board [it's a proprietary design & I can't give the whole thing away].

The RPs are SIL resistor packs, four separate resistors with the same value in each. We use them a lot in boards we make, it saves a lot of assembly time compared to discrete resistors and makes the overall boards more compact.
The bridge power transistors are D-Pak types and the extra drivers the TO-92 ones. The little bridge rec is to improve flyback energy recovery, rather than relying on diodes in the FETs.
In another device we use a couple of cross-connected schmitt trigger NAND gates with r-c networks to give two outputs from an on-off signal, with a very short but definable non-overlap delay between them. That's designed to drive opposed solenoid coils and only has single ended outputs, but with a delay to allow the field in each coil to decay somewhat before energising the opposite side.
That type of circuit could be used to give an imperceptible all-off delay, but the end use of the design is the main consideration - is going full brick-outhouse, belt-and-braces with everything needed or useful in a particular application?
We pretty much alway do, but it's down to the specific business field and end user cost vs quality requirements.
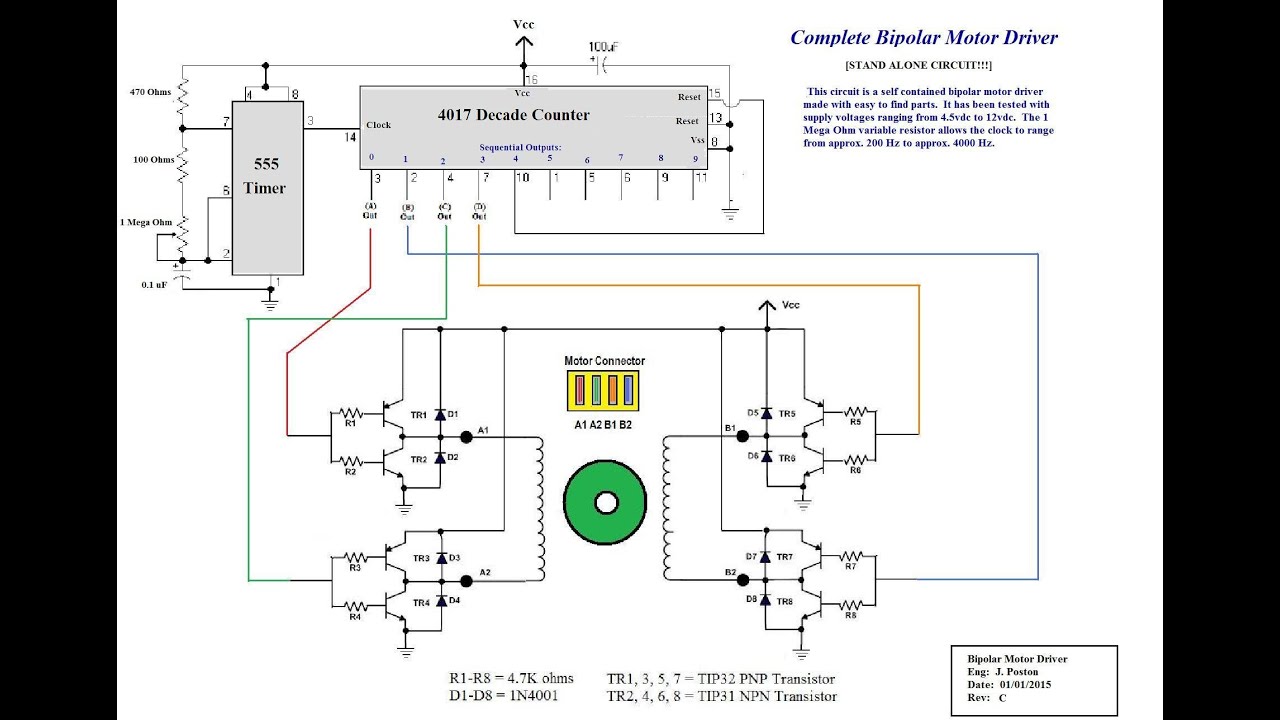
ps. The stepper circuit above contains exactly the type of design feature I avoid - two opposed transistors sharing a drive signal.
If the drive malfunctions both transistors in each pair turn on at the same time...
It's a "cheap and cheerful" method but not failsafe.