Johnmcfly
New Member
Hello everyone !
At the moment, I am working on a control theory topic and I have a question is related to stability. I know it is a really important topic in control theory.
My question is how to analysis a closed loop system according to a controller.
Let's consider a standard loop like this :
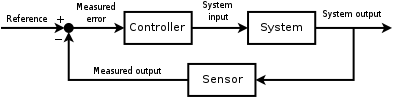
Let's say tha the transfer function for a sensor is equal to 1 (do not know why but always like this).
The system can be a first order system and the controller a PI controller.
What is the approach to determinate the stability and the limits of the system ?
My guess is the following:
- check first the stability of the system (Nyquist plot or Bode)
- check the stability of the system + controller (Nyquist plot or Bode)
- check the stability of the system + controller+feedback (Nyquist plot or Bode)
and for the controller, how should I proceed ? I cannot test for every values of P and I...
Thanks for your feedback !")
At the moment, I am working on a control theory topic and I have a question is related to stability. I know it is a really important topic in control theory.
My question is how to analysis a closed loop system according to a controller.
Let's consider a standard loop like this :
Let's say tha the transfer function for a sensor is equal to 1 (do not know why but always like this).
The system can be a first order system and the controller a PI controller.
What is the approach to determinate the stability and the limits of the system ?
My guess is the following:
- check first the stability of the system (Nyquist plot or Bode)
- check the stability of the system + controller (Nyquist plot or Bode)
- check the stability of the system + controller+feedback (Nyquist plot or Bode)
and for the controller, how should I proceed ? I cannot test for every values of P and I...
Thanks for your feedback !
