camerart
Well-Known Member
Hi,
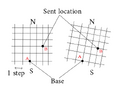
I'm trying to learn how to calculate between GPS locations, as in how a radio control model moves.
The project I'm working on, moves a location around by using joysticks, which is translated into GPS LAT/LON locations, as the joysticks are moved. The model (REMOTE) follows these fast moving locations, in a similar manor to conventional RC models.
The reason for this unusual method is due to eye sight and the inability to know which way my models are aiming, so I crash them for safety. This method would allow me to aim the model towards, me and fly forward in my direction.
It has been in development for 5-6 years, and the time has at last come for the location calculations.
Any help welcome.
Cheers, Camerart.
I'm trying to learn how to calculate between GPS locations, as in how a radio control model moves.
The project I'm working on, moves a location around by using joysticks, which is translated into GPS LAT/LON locations, as the joysticks are moved. The model (REMOTE) follows these fast moving locations, in a similar manor to conventional RC models.
The reason for this unusual method is due to eye sight and the inability to know which way my models are aiming, so I crash them for safety. This method would allow me to aim the model towards, me and fly forward in my direction.
It has been in development for 5-6 years, and the time has at last come for the location calculations.
Any help welcome.
Cheers, Camerart.
Last edited: