hi,
i was trying to use the digital optical encoder in a mouse to calculate the rpm of my motor. i was trying to see what kind of output do the IR sensors send to the mouse controller em84510ep. but giving common ground to the oscilloscope tends to hang the mouse.
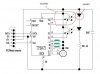
does anyone know how to use the ir sensors in a mouse. the mouse has a white and black transmitter and receiver. the transmitter has two pins and the receiver has three.
now two pins (one each of transmitter and receiver) are connected to gnd. the other pin of the transmitter is connected to the mouse controller via a resistor. and the remaining two pins of the receiver are connected to X1 and X2 of the controller.
can anyone help
i was trying to use the digital optical encoder in a mouse to calculate the rpm of my motor. i was trying to see what kind of output do the IR sensors send to the mouse controller em84510ep. but giving common ground to the oscilloscope tends to hang the mouse.
does anyone know how to use the ir sensors in a mouse. the mouse has a white and black transmitter and receiver. the transmitter has two pins and the receiver has three.
now two pins (one each of transmitter and receiver) are connected to gnd. the other pin of the transmitter is connected to the mouse controller via a resistor. and the remaining two pins of the receiver are connected to X1 and X2 of the controller.
can anyone help