This project uses a 12F508 (or 12F509) to read a keypad and send the results over RS232. It is most useful as an add-on to other pic projects that require some way to input numbers. This keypad acts the same way as your PC keyboard in that when a key is held down, it has the short delay before it repeats the key. Both the delay and repeat speed are settable in software just like your PC keyboard.
Many people will wonder what "2 key rollover" means. The best answer is with a little demonstration. Open your favourite text editor, hold down the "A" key and when it starts repeating press the "B" key. Even though 2 keys are now held down the keyboard sends the last key pressed. This is useful because many people will press the keys so fast that they inadvertently press two keys at once.
How does it work.
The Schematic,

The 12F508 only has 6 input/output (I/O) pins and we need 1 to send the serial data out which leaves only 5 left to read the keypad. The keypad has 4 rows and 3 columns which is too many for our little pic chip. The way we get around this problem is by using the same pins twice. You see the three resistors in the diagram, well they will make the three pic pins low by connecting them to ground. If we now make GP4 high the diode on row 1 will conduct and if any keys are pressed in row 1 then the corresponding pin GP0, GP1 or GP3 will also go high. We have successfully read row 1. We can repeat this with GP4 and read row 3.
Now comes the tricky part because the diodes on rows 0 and 2 are backward and so the only way to read those rows is by outputting a zero on GP4 and GP5 thus making the input pins low. But, wait a minute, they are already low due to those resistors and so we won't see any change. Luckily for us the pics have internal resistors that connect the (input) pins to the 5V line that we can turn on and off in software. These resistors have a value around 20k and so will overpower the 200k external ones and make the input pins 5V. So, with these internal resistors turned on we can make GP4 an output, set it low and any pins that are now low will indicate a key pressed on row 0. We can repeat this using GP5 to read row 2.
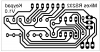
The board,

Closer,

The two sets of connectors are just for convenience, I added the second set to enable me to use it on a breadboard.
The finished article,

The code,
A video.
[embed]http://www.youtube.com/v/Q2xrVV9w-yE&hl=en&fs=1[/embed]
Note, this will not work with newer pic chips as they don't have the WPU on I/O 3.
<edit>Somethings I forgot,
The connections from left to right are GND, RS232 out and 5V.
The output is TTL and so can be connected straight to a pic RX pin without a MAX232 chip.
If you want an inverted signal to connect to a PC then uncomment the #define inverted line in the source.
You can change the repeat delay and repeat rate in the source.
</edit>
Mike.
Many people will wonder what "2 key rollover" means. The best answer is with a little demonstration. Open your favourite text editor, hold down the "A" key and when it starts repeating press the "B" key. Even though 2 keys are now held down the keyboard sends the last key pressed. This is useful because many people will press the keys so fast that they inadvertently press two keys at once.
How does it work.
The Schematic,
The 12F508 only has 6 input/output (I/O) pins and we need 1 to send the serial data out which leaves only 5 left to read the keypad. The keypad has 4 rows and 3 columns which is too many for our little pic chip. The way we get around this problem is by using the same pins twice. You see the three resistors in the diagram, well they will make the three pic pins low by connecting them to ground. If we now make GP4 high the diode on row 1 will conduct and if any keys are pressed in row 1 then the corresponding pin GP0, GP1 or GP3 will also go high. We have successfully read row 1. We can repeat this with GP4 and read row 3.
Now comes the tricky part because the diodes on rows 0 and 2 are backward and so the only way to read those rows is by outputting a zero on GP4 and GP5 thus making the input pins low. But, wait a minute, they are already low due to those resistors and so we won't see any change. Luckily for us the pics have internal resistors that connect the (input) pins to the 5V line that we can turn on and off in software. These resistors have a value around 20k and so will overpower the 200k external ones and make the input pins 5V. So, with these internal resistors turned on we can make GP4 an output, set it low and any pins that are now low will indicate a key pressed on row 0. We can repeat this using GP5 to read row 2.
The board,
Closer,
The two sets of connectors are just for convenience, I added the second set to enable me to use it on a breadboard.
The finished article,
The code,
Code:
;*******************************************************************
; Title 12F509 RS232 KeyPad
; Author Mike Webb
; Date 12th January 2009
; Version 1.0
;*******************************************************************
;
processor 12F509
include "p12f509.inc"
errorlevel -302
radix dec
__CONFIG _MCLRE_OFF & _CP_OFF & _WDT_OFF & _IntRC_OSC
;uncomment the following line to invert the RS232 signal.
;when inverted it can connect straight to a PC without a MAX232
;#define Inverted
#define GPIO0 0
#define GPIO1 1
#define GPIO2 2
#define GPIO3 3
#define GPIO4 4
#define GPIO5 5
#define b_GPIO0 GPIO,0
#define b_GPIO1 GPIO,1
#define b_GPIO2 GPIO,2
#define b_GPIO3 GPIO,3
#define b_GPIO4 GPIO,4
#define b_GPIO5 GPIO,5
#define RS232 2
#define b_RS232Out GPIO,RS232
cblock 07h
OutByte
Temp
Count
Key0
Key1
Old0
Old1
Edge0
Edge1
KeyCount
endc
KeyDelay equ 35 ;delay in 100th second until repeat kicks in
KeyRepeat equ 10 ;delay between repeated keys
org 0h
;********************************************************************
; 4 meg clock = 1.0 meg instructions
org 0h
movwf OSCCAL ;write calibration value
start movlw 0
OPTION
#ifdef Inverted
bcf b_RS232Out ;ensure RS232 is high
#else
bsf b_RS232Out ;ensure RS232 is high
#endif
movlw b'11111111'-(1<<RS232)
TRIS GPIO ;all input except RS232 output
call Wait100th
call Wait100th
Loop Call Wait100th ;needed for timing and debounce
movfw Key0
movwf Old0 ;keep copy of previous keys
movfw Key1
movwf Old1
call ReadKeys ;read the key matrix into Key0 and Key1
movfw Key0
iorwf Key1,W ;any key pressed
btfsc STATUS,Z
goto Loop
movfw Key0 ;get key state
xorwf Old0,W ;keep changed bits (pressed and released)
andwf Key0,W ;keep only new presses
btfss STATUS,Z
goto NewKeyDown
movfw Key1
xorwf Old1,W
andwf Key1,W
btfsc STATUS,Z
goto KeySame
NewKeyDown movlw KeyDelay ;start key delay
movwf KeyCount
movfw Key0 ;edge = (key^old)&key
xorwf Old0,W
andwf Key0,W
movwf Edge0 ;edges contains a 1 for each new key press
movfw Key1
xorwf Old1,W
andwf Key1,W
movwf Edge1
goto HaveKey
KeySame decfsz KeyCount,F ;key delay
goto Loop
movlw KeyDelay ;if KeyDelay is zero
iorlw 0 ;then no repeat allowed
btfsc STATUS,Z
goto Loop
movlw KeyRepeat
movwf KeyCount
HaveKey
; having got to here then a key is pressed for the first time
; or the repeat time is up and so it needs repeating.
; Edge0 or Edge1 contain the key pressed.
movfw Edge0 ;does edge0 have a bit set
btfsc STATUS,Z
goto IsEdge1 ;no so must be edge1
movwf Temp
movlw 255 ;set count to -1
goto CountBits
IsEdge1 movfw Edge1 ;move edge1
movwf Temp ;into temp and
movlw 7 ;count to 7
CountBits movwf Count
bsf STATUS,C ;ensure it can't get stuck in loop
CountBitsL incf Count,F ;increment counter
rrf Temp,F ;until we find a set bit
btfss STATUS,C
goto CountBitsL
movfw Count ;W=key number 0-15
Call Bit2Key ;convert to key character
call Send ;send key via RS232
goto Loop
ReadKeys movlw 0<<NOT_GPPU ; WPUs ON
OPTION
movlw b'11111111'-(1<<GPIO5)-(1<<RS232)
tris GPIO ;make I/O 5 output
bcf b_GPIO5 ;and make it low
call BitDelay ;avoid RMW
clrf Key0 ;will hold key state
btfss b_GPIO0 ;if I/O 0 low then key pressed
bsf Key0,0 ;so set the bit
btfss b_GPIO1 ;repeat
bsf Key0,1 ;for
btfss b_GPIO3 ;other
bsf Key0,2 ;keys
movlw b'11111111'-(1<<GPIO4)-(1<<RS232)
tris GPIO ;make I/O 4 output
bcf b_GPIO4 ;and make it low
Call BitDelay
btfss b_GPIO0 ;read next row
bsf Key0,4
btfss b_GPIO1
bsf Key0,5
btfss b_GPIO3
bsf Key0,6
movlw 1<<NOT_GPPU ;WPUs OFF
OPTION
movlw b'11111111'-(1<<GPIO5)-(1<<RS232)
tris GPIO ;make I/O 5 output
bsf b_GPIO5 ;and make it high
call BitDelay
clrf Key1
btfsc b_GPIO0 ;I/O 0 will be pulled low by
bsf Key1,0 ;220k resistors unless key pressed
btfsc b_GPIO1
bsf Key1,1 ;same for rest of row
btfsc b_GPIO3
bsf Key1,2
movlw b'11111111'-(1<<GPIO4)-(1<<RS232)
tris GPIO ;make I/O 4 output
bsf b_GPIO4 ;and high
call BitDelay
btfsc b_GPIO0
bsf Key1,4 ;read next row
btfsc b_GPIO1
bsf Key1,5
btfsc b_GPIO3
bsf Key1,6
retlw 0
Bit2Key andlw 15
KeyTable addwf PCL,F
retlw '7'
retlw '8'
retlw '9'
retlw 'x'
retlw '1'
retlw '2'
retlw '3'
retlw 'x'
retlw '*'
retlw '0'
retlw '#'
retlw 'x'
retlw '4'
retlw '5'
retlw '6'
retlw 'x'
#ifdef Inverted
Send movwf OutByte
bsf b_RS232Out
call BitDelay
bsf STATUS,C
SendLoop rrf OutByte,F
movfw OutByte
btfsc STATUS,Z
goto EndTransmit
bsf b_RS232Out
btfsc STATUS,C
bcf b_RS232Out
call BitDelay
bcf STATUS,C
goto SendLoop
EndTransmit bcf b_RS232Out
call BitDelay
call BitDelay
retlw 0
#else
Send movwf OutByte
bcf b_RS232Out
call BitDelay
bsf STATUS,C
SendLoop rrf OutByte,F
movfw OutByte
btfsc STATUS,Z
goto EndTransmit
bcf b_RS232Out
btfsc STATUS,C
bsf b_RS232Out
call BitDelay
bcf STATUS,C
goto SendLoop
EndTransmit bsf b_RS232Out
call BitDelay
call BitDelay
retlw 0
#endif
; at 1 meg instructions and 2400 baud
; delay is 1,000,000/2400 = 416 cc
; the calling loop and the call/return = 13
; therefore delay needs to be 403 cycles
; to change to 9600 baud
; delay needs to be 104 - 13 = 91
; which would be (3*30)-1 = 89 + 2 = 91
BitDelay movlw 30 ;134 change back to 134 for 2400 baud
movwf Temp
DelayLoop decfsz Temp,F; (3*134)-1 = 401 + 2 = 403
goto DelayLoop
retlw 0
Wait100th clrf Count
movlw 13
movwf Temp
Delay100L decfsz Count,F; (256*3)-1 = 767
goto Delay100L
decfsz Temp,F; (13*(767+3))-1 = 10009 + 3 = 10012
goto Delay100L
retlw 0
ENDA video.
[embed]http://www.youtube.com/v/Q2xrVV9w-yE&hl=en&fs=1[/embed]
Note, this will not work with newer pic chips as they don't have the WPU on I/O 3.
<edit>Somethings I forgot,
The connections from left to right are GND, RS232 out and 5V.
The output is TTL and so can be connected straight to a pic RX pin without a MAX232 chip.
If you want an inverted signal to connect to a PC then uncomment the #define inverted line in the source.
You can change the repeat delay and repeat rate in the source.
</edit>
Mike.
Attachments
Last edited:
")
