henriquesv
New Member
Hello everyone.
I would like a piece of advice. I want to control a 200W DC motor through PWM.
I have a 24V battery as the DC source.
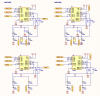
The control is being handled by a circuit made of a PIC 18F2550 and two L298 H-Bridge in parallel with high speed diodes (250Hz).
I can make the motor roll really fast, but when it gets to torque it just don't have any power. The same motor works great if DC is directly applied with a help of a knob.
Any tips / hints?
Thank you.
I would like a piece of advice. I want to control a 200W DC motor through PWM.
I have a 24V battery as the DC source.
The control is being handled by a circuit made of a PIC 18F2550 and two L298 H-Bridge in parallel with high speed diodes (250Hz).
I can make the motor roll really fast, but when it gets to torque it just don't have any power. The same motor works great if DC is directly applied with a help of a knob.
Any tips / hints?
Thank you.


")

