poofjunior
New Member
Hey everyone, I'm looking at brushless dc motor control theory with the idea of building my own for position control. Here's my set of parts so far:
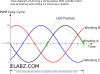
This timing_diagram picture from elabz.com shows the desired output current for a given location in electrical degrees to maximize the torque on the rotor to get it to rotate. (In reality, this pattern is repeated 7 times to get a full rotation on my three-phase motor with 7 pole pairs.) According to the application note from Microchip, "maximum torque is obtained when the permanent magnet rotor is 90 degrees away from alignment with the stator magnetic field," and I'm assuming that the timing_diagram is telling me exactly that.
I've got two questions, though:
- Amt103 capacitive encoder: **broken link removed**
- Turnigy HD 5206 Gimbal motor: https://www.hobbyking.com/hobbyking...rushless_Gimbal_Motor_BLDC_US_Warehouse_.html
This timing_diagram picture from elabz.com shows the desired output current for a given location in electrical degrees to maximize the torque on the rotor to get it to rotate. (In reality, this pattern is repeated 7 times to get a full rotation on my three-phase motor with 7 pole pairs.) According to the application note from Microchip, "maximum torque is obtained when the permanent magnet rotor is 90 degrees away from alignment with the stator magnetic field," and I'm assuming that the timing_diagram is telling me exactly that.
I've got two questions, though:
- If max torque is produced by applying the appropriate waveform for the given angle in the diagram, does that waveform only apply to getting the rotor to turn in one direction? If so, do I reverse direction of the rotor by applying the inverse of the value displayed in the diagram (so as to apply the max torque in the opposite direction?)
- I'm using a pretty good encoder, but it's incremental. How do I commutate to a known position such that I know where I'm at to begin with?
Attachments
Last edited:
