joelsurfer
New Member
Hi everyone! I need help with the following:
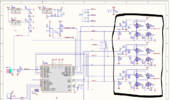
I want to design an ESC (for a three-phase brushless motor) and I am looking at a schematic that does not explain the reason for the use of switching cells in parallel. ESCs often have 6 MOSFETs of the same type, but this one has 12, 4 per phase (2 P-type above and two N-type below), with the switching cells in parallel as shown in the image. Does anyone really know why it does this? The boy says "For greater safety and to reduce the effort of the components, two elementary cells are placed in parallel for each phase of the motor." The only thing I can think of is that you implement it to divide the current that each MOSFET has to support.
Thanks for any possible answers!
I want to design an ESC (for a three-phase brushless motor) and I am looking at a schematic that does not explain the reason for the use of switching cells in parallel. ESCs often have 6 MOSFETs of the same type, but this one has 12, 4 per phase (2 P-type above and two N-type below), with the switching cells in parallel as shown in the image. Does anyone really know why it does this? The boy says "For greater safety and to reduce the effort of the components, two elementary cells are placed in parallel for each phase of the motor." The only thing I can think of is that you implement it to divide the current that each MOSFET has to support.
Thanks for any possible answers!