cartoonwally
New Member
Hey guys,
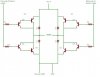
I've seen a few of the H-bridges designed by members of the forum lerking around but i wanted to see whether you thought that this one would work. I am driving the input with 4.8->6V from a servo (where the motor on the servo usually connects) and the ground from the servo circuit runs to the bottom of there. The thing i'd like to know is whether you think this circuit, and the circuit components ive chosen will work.
Q1,Q2,Q7,Q9 TIP2955 60V 15A PNP Transistor
https://www.electro-tech-online.com/custompdfs/2008/02/TIP2955.pdf
Q3,Q4,Q5,Q6 BC547 50V 100mA NPN Transistor
https://www.electro-tech-online.com/custompdfs/2008/02/BC547.pdf
R1->R4 1k0 resistor
Circuit is attached")
Btw i am aware of some of the bugs i.e floating inputs...
Also, are those diodes imperative to the design? what do they actually do? and do i really need them? (this may be a really stupid qn, flame suit on)
I've seen a few of the H-bridges designed by members of the forum lerking around but i wanted to see whether you thought that this one would work. I am driving the input with 4.8->6V from a servo (where the motor on the servo usually connects) and the ground from the servo circuit runs to the bottom of there. The thing i'd like to know is whether you think this circuit, and the circuit components ive chosen will work.
Q1,Q2,Q7,Q9 TIP2955 60V 15A PNP Transistor
https://www.electro-tech-online.com/custompdfs/2008/02/TIP2955.pdf
Q3,Q4,Q5,Q6 BC547 50V 100mA NPN Transistor
https://www.electro-tech-online.com/custompdfs/2008/02/BC547.pdf
R1->R4 1k0 resistor
Circuit is attached
Btw i am aware of some of the bugs i.e floating inputs...
Also, are those diodes imperative to the design? what do they actually do? and do i really need them? (this may be a really stupid qn, flame suit on)