Hello everyone.
I want to programming a mini sumo robot,
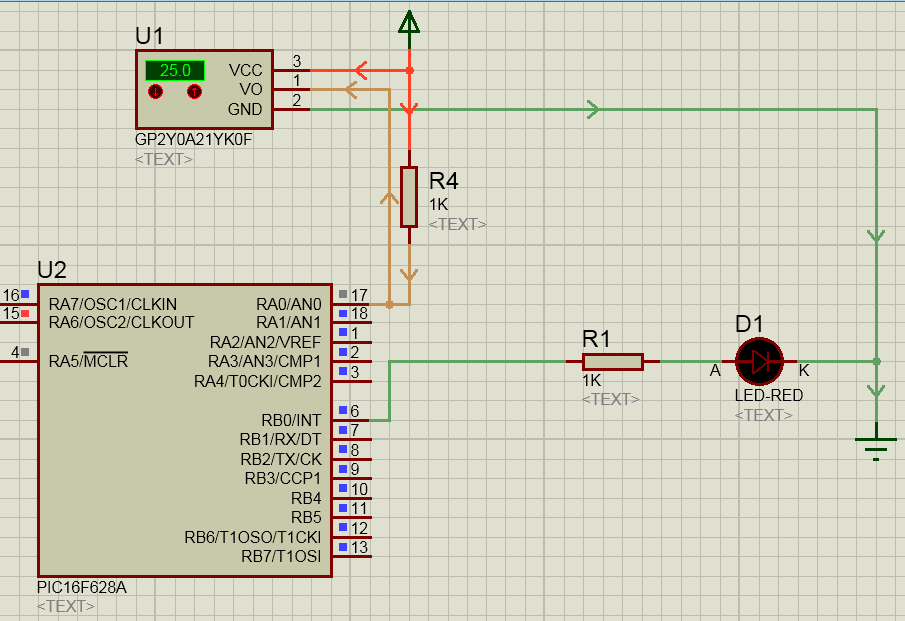
i have pic 16f628a, mz80 sensor(e18 d50nk), cny 70 or qtr1A....etc
i am using pic basic pro 2.60.
my circuit working in the isis but i can't programming mz80.
how can i programing mz80 sensor(e18 d50nk).
Thank you
I want to programming a mini sumo robot,
i have pic 16f628a, mz80 sensor(e18 d50nk), cny 70 or qtr1A....etc
i am using pic basic pro 2.60.
my circuit working in the isis but i can't programming mz80.
how can i programing mz80 sensor(e18 d50nk).
Thank you
Last edited: