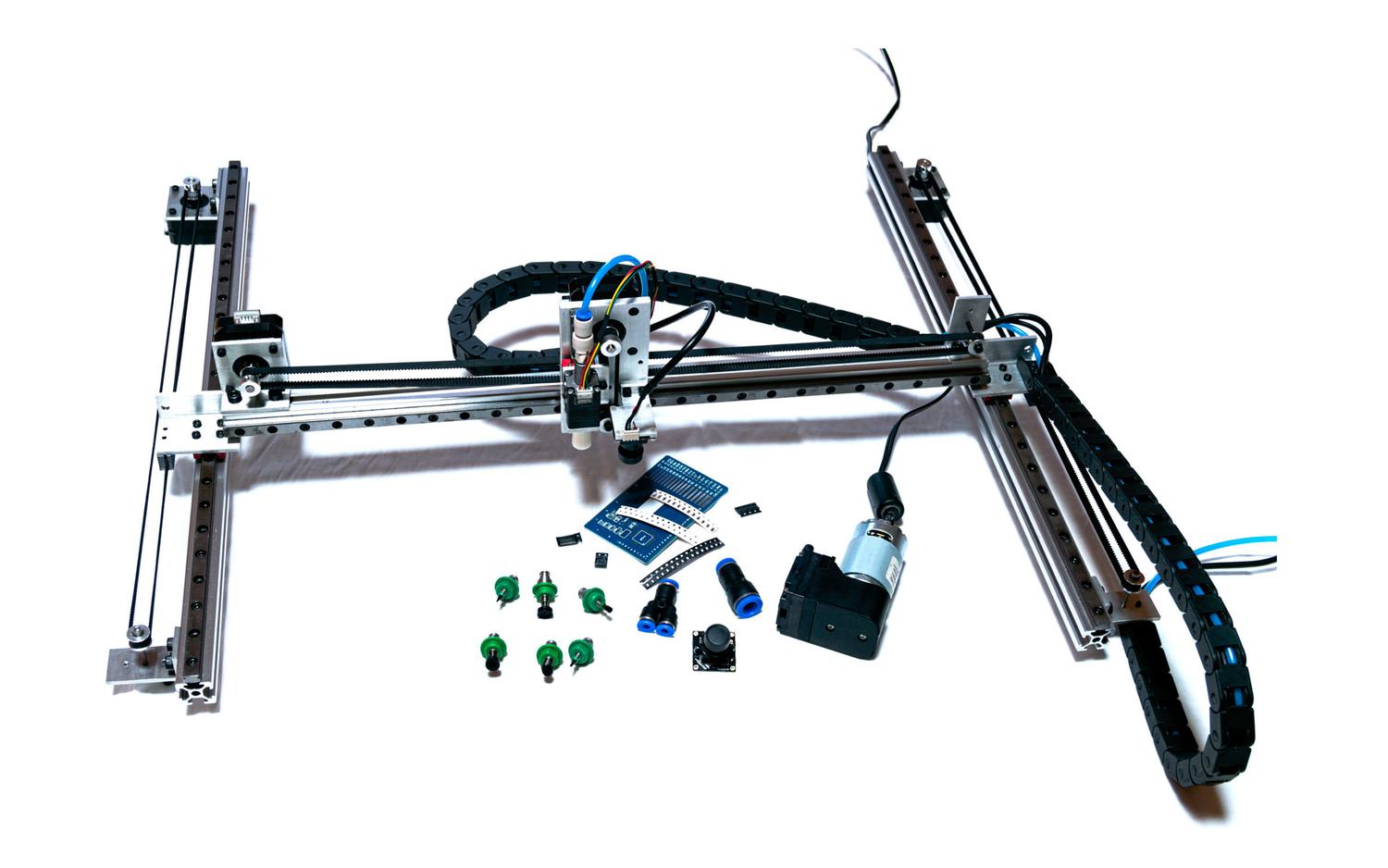
I'm designing a simple automated vacuum lifter, from a converted 3D printer.
The application: this only requires one movement on the Z axis. The manifold needs to move down, activate air (picking up parts), move back up, and release the parts onto a placed tray.
I have little experience with the electronic side of things.
I need to program and coordinate the pneumatics with the Z travels/timing, activation, etc.
EX:
The manifold moves down the Z axis... how do I set up the pneumatic part to activate. Do I need a solenoid valve and how I would integrate something like that, with the rest of the program/setup?
Most likely a solenoid doesn't use G-code.
The application: this only requires one movement on the Z axis. The manifold needs to move down, activate air (picking up parts), move back up, and release the parts onto a placed tray.
I have little experience with the electronic side of things.
I need to program and coordinate the pneumatics with the Z travels/timing, activation, etc.
EX:
The manifold moves down the Z axis... how do I set up the pneumatic part to activate. Do I need a solenoid valve and how I would integrate something like that, with the rest of the program/setup?
Most likely a solenoid doesn't use G-code.

")
