Electro Tech is an online community (with over 170,000 members) who enjoy talking about and building electronic circuits, projects and gadgets. To participate you need to register. Registration is free. Click here to register now.
Welcome to our site! Electro Tech is an online community (with over 170,000 members) who enjoy talking about and building electronic circuits, projects and gadgets. To participate you need to register. Registration is free. Click here to register now.
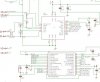
Well, this is the source code that i use for the customization of the SPI port, but i maked a few tests with a osciloscope and i had comfirmed that the port work; but the all pads from mcp3911 doesn´t show any signal. i'm using mplab 8 and Hitech picc-18
this is the code:
C:
spi.h
/***************************************
cabecera del protocolo de comunicación
SPI
****************************************/
//Modos de Trabajo
//sync_mode
#define SPI_FOSC_4 0b00000000 // SPI Master mode, clock = Fosc/4
#define SPI_FOSC_16 0b00000001 // SPI Master mode, clock = Fosc/16
#define SPI_FOSC_64 0b00000010 // SPI Master mode, clock = Fosc/64
#define SPI_FOSC_TMR2 0b00000011 // SPI Master mode, clock = TMR2 output/2
#define SLV_SSON 0b00000100 // SPI Slave mode, /SS pin control enabled
#define SLV_SSOFF 0b00000101 // SPI Slave mode, /SS pin control disabled
//Modos de Trabajo del Bus
//bus_mode
#define MODE_00 0b00000000 // Setting for SPI bus Mode 0,0
//CKE 0x40 // SSPSTAT register
//CKP 0x00 // SSPCON1 register
#define MODE_01 0b00000001 // Setting for SPI bus Mode 0,1
//CKE 0x00 // SSPSTAT register
//CKP 0x00 // SSPCON1 register
#define MODE_10 0b00000010 // Setting for SPI bus Mode 1,0
//CKE 0x40 // SSPSTAT register
//CKP 0x10 // SSPCON1 register
#define MODE_11 0b00000011 // Setting for SPI bus Mode 1,1
//CKE 0x00 // SSPSTAT register
//CKP 0x10 // SSPCON1 register
//Modos de Trabajo Fase
//smp_phase
#define SMPEND 0b10000000 // Input data sample at end of data out
#define SMPMID 0b00000000 // Input data sample at middle of data out
/* SSPCON1 REGISTER */
#define SSPENB 0b00100000 // Enable serial port and configures SCK, SDO, SDI
unsigned char DataRdySPI(void);
//Operacion del Puerto
void CloseSPI(void);
void OpenSPI(unsigned char sync_mode,unsigned char bus_mode,unsigned char smp_phase);
//Funciones Lectura
unsigned char ReadSPI(void);
unsigned char getcSPI(void);
void getsSPI(unsigned char *rdptr, unsigned char length);
//Funciones Escritura
unsigned char WriteSPI(unsigned char data_out);
unsigned char putcSPI(unsigned char cx);
void pudsSPI(unsigned char *wrptr);
C:
spi.c
#include <pic18.h>
#include <sys.h>
#include <ctype.h>
#include <stdlib.h>
#include "spi.h"
#include "config.h"
unsigned char DataRdySPI(void)
{
if (BF)
return ( +1 ); // data in SSP1BUF register
else
return ( 0 ); // no data in SSP1BUF register
}
//Funciones Operacion
void CloseSPI(void)
{
SSPCON1 &= 0xDF;
}
void OpenSPI(unsigned char sync_mode,unsigned char bus_mode,unsigned char smp_phase)
{
SSPSTAT &= 0x3F; // power on state
SSPCON1 = 0x00; // power on state
SSPCON1 |= sync_mode; // select serial mode
SSPSTAT |= smp_phase; // select data input sample phase
TRIS_SDI=1;
TRIS_SDO=0;
TRIS_SCK=0;
TRIS_SS=0;
TRIS_DATAR=1;
TRIS_RST=0;
switch( bus_mode )
{
case 0: // SPI bus mode 0,0
CKE = 1; // data transmitted on falling edge
break;
case 2: // SPI bus mode 1,0
CKE = 1; // data transmitted on rising edge
CKP = 1; // clock idle state high
break;
case 3: // SPI bus mode 1,1
CKP = 1; // clock idle state high
break;
default: // default SPI bus mode 0,1
break;
}
SSPCON1 |= SSPENB; // enable synchronous serial port
}
//Funciones Lectura
unsigned char ReadSPI(void)
{
unsigned char TempVar;
TempVar = SSPBUF; // Clear BF
SSPIF = 0; // Clear interrupt flag
SSPBUF = 0x00; // initiate bus cycle
//while ( !BF ); // wait until cycle complete
while(!SSPIF)continue; // wait until cycle complete
return SSPBUF; // return with byte read
}
unsigned char getcSPI(void)
{
SSPBUF = 0; // trigger 8 SCK pulses to shift in data
while(!BF)continue; // wait until the whole byte has been shifted in
return SSPBUF; // return with byte read
}
void getsSPI(unsigned char *rdptr, unsigned char length)
{
while ( length ) // stay in loop until length = 0
{
*rdptr++=getcSPI(); // read a single byte
length--; // reduce string length count by 1
}
}
//Funciones Escritura
unsigned char WriteSPI(unsigned char data_out)
{
unsigned char TempVar;
TempVar = SSPBUF; // Clears BF
SSPIF = 0; // Clear interrupt flag
WCOL = 0; //Clear any previous write collision
SSPBUF = data_out; // write byte to SSPBUF register
if ( SSPCON1 & 0x80 ) // test if write collision occurred
return ( -1 ); // if WCOL bit is set return negative #
else
//while( !BF ); // wait until bus cycle complete
while( !SSPIF )continue; // wait until bus cycle complete
return ( 0 ); // if WCOL bit is not set return non-negative#
}
unsigned char putcSPI(unsigned char cx)
{
if ( SSPCON1 & 0x80 ) // test if write collision occurred
{
return (-1); // if WCOL bit is set return negative #
}
else
{
SSPBUF = cx;
while( !BF )continue; // wait until bus cycle complete
}
return ( 0 );
}
void pudsSPI(unsigned char *wrptr)
{
while ( *wrptr ) // test for string null character
{
SSPBUF = *wrptr++; // initiate SPI bus cycle
while( !BF ); // wait until 'BF' bit is set
}
}
this is the section of the main code i'm using for the firmware
This site uses cookies to help personalise content, tailor your experience and to keep you logged in if you register.
By continuing to use this site, you are consenting to our use of cookies.