org h'0004'
ISR_Vector
;
; save main program context
;
movwf W_ISR ; save W-reg |B?
swapf STATUS,W ; doesn't change STATUS bits |B?
movwf S_ISR ; save STATUS reg |B?
clrf STATUS ; force bank 0 |B0
movf FSR,W ; |B0
movwf F_ISR ; save FSR |B0
;
; clear CCP1 interrupt flag and CCP1 "CLK" line
;
bcf PIR1,CCP1IF ; clear CCP interrupt flag bit |B0
bcf PORTB,CLK ; clear CCP1/RB3 'CLK' pin |B0
;
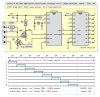
; Qarray holds ten 16-bit period values, one for each of the
; ten shift register Qn outputs. Eight Qn outputs and periods
; drive Servos. The other two Qn outputs are unused but their
; periods are used to complete a 20-msec Servo cycle.
;
; Qarray(0) is Q1 Servo 1 "on" time, 400..2400
; Qarray(1) is Q2 Servo 2 "on" time, 400..2400
; Qarray(2) is Q3 Servo 3 "on" time, 400..2400
; Qarray(3) is Q4 Servo 4 "on" time, 400..2400
; Qarray(4) is Q5 Servo 5 "on" time, 400..2400
; Qarray(5) is Q6 Servo 6 "on" time, 400..2400
; Qarray(6) is Q7 Servo 7 "on" time, 400..2400
; Qarray(7) is Q8 Servo 8 "on" time, 400..2400
; Qarray(8) is Q9 unused cycle time, 400 (fixed)
; Qarray(9) is Q0 end-of-cycle time, 400..16800
;
; add current Qarray(Qn) period to previous CCPR1L:CCPR1H
;
setc ; set carry |B0
rlf Qindex,W ; Qn index [0..9] * 2 + 1 |B0
addlw Qarray ; add to array base address |B0
movwf FSR ; setup indirect address |B0
movf INDF,W ; Qn period hi [400..2400] |B0
addwf CCPR1H,f ; set new CCP compare time hi |B0
decf FSR,f ; |B0
movf INDF,W ; Qn period lo [400..2400] |B0
addwf CCPR1L,f ; set new CCP compare time lo |B0
skpnc ; carry? no, skip, else |B0
incf CCPR1H,f ; |B0
;
; subtract current Qarray(Qn) period from Q0 end-of-cycle time
; in Qarray(9)
;
movf INDF,W ; Qn on-time lo [400..2400] |B0
subwf Qarray+.18,f ; subtract from end-of-cycle lo |B0
incf FSR,f ; |B0
movf INDF,W ; Qn on-time hi [400..2400] |B0
skpc ; borrow? no, skip, else |B0
incfsz INDF,W ; increment subtrahend |B0
subwf Qarray+.19,f ; subtract from end-of-cycle hi |B0
;
; increment Qindex [0..9] for next Qn period
;
incf Qindex,f ; increment Qn index |B0
movf Qindex,W ; |B0
xorlw d'10' ; end-of-cycle? |B0
bnz ISR_XIT ; no, branch, else |B0
;
; reset Qindex and Q0 end-of-cycle time in Qarray(9)
;
clrf Qindex ; reset Qn index to 0 |B0
movlw low d'20000' ; reset Q0 time to 20000 usecs |B0
movwf Qarray+.18 ; |B0
movlw high d'20000' ; |B0
movwf Qarray+.19 ; |B0
bsf PORTA,CLR ; force Q0 output sync |B0
bcf PORTA,CLR ; |B0
;
; restore main program context
;
ISR_XIT
movf F_ISR,W ; |B0
movwf FSR ; restore FSR |B0
swapf S_ISR,W ; |B0
movwf STATUS ; restore STATUS |B?
swapf W_ISR,f ; don't screw up STATUS |B?
swapf W_ISR,W ; restore W-reg |B?
retfie ; return from interrupt |B?

")