Proportional control for Dragonfly helicopter
Hi guys,
This is my first post on the forum, and hope someone can help. I've been through the threads and haven't found a solution yet.
I have, amongst other r/c aircraft a Dragonfly 2 channel helicopter, really just a toy. Controls presently are simple up, down, hover, spin left and right, non-proportional. Although described as a 2 channel control, chips used are the tx/rx-2b 5 function job designed for toy cars. Data sheet is here:
datasheet4u.com/html/T/X/-/TX-2B_SilanSemiconductors.pdf.html
It occured to me that if one of the functions could be made proportional, it would leave 2 spare channels to control direction (currently not available).
Early experiments are good. Replacing the original full speed on/off switch in the transmitter with a PWM circuit to control the main motor works well, the motor speed now being truly proportional, hopefully giving much better up/down/hover control. (so far without any changes to the receiver end)
However there's one snag so far with the circuit I've used. If any part of my body gets too close to the circuit (or the aerial), the motor spins up to full speed, dropping back to controlled speed if I move away again. I've tried various decoupling caps etc to no avail.
If anyone can help I'd be much obliged.
Davegriff
Hi guys,
This is my first post on the forum, and hope someone can help. I've been through the threads and haven't found a solution yet.
I have, amongst other r/c aircraft a Dragonfly 2 channel helicopter, really just a toy. Controls presently are simple up, down, hover, spin left and right, non-proportional. Although described as a 2 channel control, chips used are the tx/rx-2b 5 function job designed for toy cars. Data sheet is here:
datasheet4u.com/html/T/X/-/TX-2B_SilanSemiconductors.pdf.html
It occured to me that if one of the functions could be made proportional, it would leave 2 spare channels to control direction (currently not available).
Early experiments are good. Replacing the original full speed on/off switch in the transmitter with a PWM circuit to control the main motor works well, the motor speed now being truly proportional, hopefully giving much better up/down/hover control. (so far without any changes to the receiver end)
However there's one snag so far with the circuit I've used. If any part of my body gets too close to the circuit (or the aerial), the motor spins up to full speed, dropping back to controlled speed if I move away again. I've tried various decoupling caps etc to no avail.
If anyone can help I'd be much obliged.
Davegriff
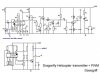
Attachments

Last edited:

") . I know these things are cheap, but not everyone can afford expensive planes and may want to copy what I've done.
. I know these things are cheap, but not everyone can afford expensive planes and may want to copy what I've done.