brandon1213
New Member
Hi Everyone,
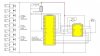
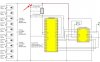
I'm an amateur roboticist trying to design my very first circuit. It is a circuit to power and control a little solar powered car with a motor for acceleration and servo for steering. It's probably a little ambitious for a first circuit, but I'm really determined to build it!
I've played around with some solar powered robot kits before, but this is my first time trying to design my own robot. All my knowledge has come from online tutorials I've been able to get my hands on. I'd really appreciate it if someone more experienced could take a look and critique my schematic. I want to get some advice on it and fix it before I order parts and start building.
**broken link removed**
Thanks a lot!
-Brandon
I'm an amateur roboticist trying to design my very first circuit. It is a circuit to power and control a little solar powered car with a motor for acceleration and servo for steering. It's probably a little ambitious for a first circuit, but I'm really determined to build it!
I've played around with some solar powered robot kits before, but this is my first time trying to design my own robot. All my knowledge has come from online tutorials I've been able to get my hands on. I'd really appreciate it if someone more experienced could take a look and critique my schematic. I want to get some advice on it and fix it before I order parts and start building.
**broken link removed**
Thanks a lot!
-Brandon