Bob Parihar
Member
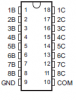
iam using 89S52 wit ULN2803A to drive a stepper motor
iam confused about the connection the stepper motor iam using is shown in the attached picture here
my code
#include<reg51.h>
void delay(unsigned int count)
{
int i,j;
for(i=0;i<count;i++)
for(j=0;j<1275;j++); // delay about a milli sec
}
void main()
{
while(1)
{
P2=0x01; // uln2803a connected to port 2
delay(10);
P2=0x03;
delay(10);
P2=0x02;
delay(10);
P2=0x06;
delay(10);
P2=0x04;
delay(10);
P2=0x0C;
delay(10);
P2=0x08;
delay(10);
P2=0x09;
delay(10);
}
}
here is the circuit iam following in the attached pics
problem here is stepper motor do not revolve but when i simulate it in the proteus software with ULN2003A instead of ULN2803A it works fine
when doing it on hardware when i forcefully try to revolve the stepper motor it resist (vibrate)..
any one please make me correct
iam confused about the connection the stepper motor iam using is shown in the attached picture here
my code
#include<reg51.h>
void delay(unsigned int count)
{
int i,j;
for(i=0;i<count;i++)
for(j=0;j<1275;j++); // delay about a milli sec
}
void main()
{
while(1)
{
P2=0x01; // uln2803a connected to port 2
delay(10);
P2=0x03;
delay(10);
P2=0x02;
delay(10);
P2=0x06;
delay(10);
P2=0x04;
delay(10);
P2=0x0C;
delay(10);
P2=0x08;
delay(10);
P2=0x09;
delay(10);
}
}
here is the circuit iam following in the attached pics
problem here is stepper motor do not revolve but when i simulate it in the proteus software with ULN2003A instead of ULN2803A it works fine
when doing it on hardware when i forcefully try to revolve the stepper motor it resist (vibrate)..
any one please make me correct
Attachments


Last edited:
