Electro Tech is an online community (with over 170,000 members) who enjoy talking about and building electronic circuits, projects and gadgets. To participate you need to register. Registration is free. Click here to register now.
Welcome to our site! Electro Tech is an online community (with over 170,000 members) who enjoy talking about and building electronic circuits, projects and gadgets. To participate you need to register. Registration is free. Click here to register now.
Yes you can use a PIC. However, you will need to use something like the POB Camera, CMU2 Camera, or CMU3 Camera because a PIC is not powerful enough to do image processing. These cameras are designed to let hobbiests use vision and have a more powerful processor built into them that can handle this.
It's realy complicated and messy to build your own vision system from scratch anyways.
what part of the human senses?
if the eyes, use cameras or tiny radioshack light to frequency converters if you want to be accurate on the size of the robot.
what part of the human senses?
if the eyes, use cameras or tiny radioshack light to frequency converters if you want to be accurate on the size of the robot.
Yes you can use a PIC. However, you will need to use something like the POB Camera, CMU2 Camera, or CMU3 Camera because a PIC is not powerful enough to do image processing. These cameras are designed to let hobbiests use vision and have a more powerful processor built into them that can handle this.
It's realy complicated and messy to build your own vision system from scratch anyways.
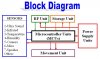
the robot will send all the data to the computer using the RF unit. So, after i use the POB Camera, CMU2 Camera, or CMU3. how can i send the data to the computer. using the RF unit directly or PIC.
If you use a zigbee module, you can basically make a wireless RS-232 cable that can uses hyperterminal (or some other GUI software to mask hyperterminal) to communicate with your PIC.
But, you won't be able to transmit video. Transmitting digital video wirelessly is very expensive. You are almost better off using a wireless security camera system with a separate TV monitor if you do not need to do any image processing. If you need to do image processing so the robot can use the images on it's own, you need a CMU cam (and maybe attach a wireless video transmitter the composite output of the CMU Cam you can view it yourself on a separate TV monitor). But you probably won't find a feasible way to display the video on your computer screen.
This site uses cookies to help personalise content, tailor your experience and to keep you logged in if you register.
By continuing to use this site, you are consenting to our use of cookies.