Jules_Theone
Member
Does anyone have experience with CAN transceivers or suggest ideas for what could cause them to fail? I am investigating how they fail, but am finding it difficult to actually get them to fail under lab conditions.
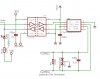
I am currently working on improving motor controller boards used to drive a 60V/4Amp BLDC motor on an oil exploration tool. The setup is as follows; 60v and CANH/CANL connect to the board through a micro-d connector, the 60v is stepped down with a switching power supply to 3v3, 7v and 12v. The CAN transceiver is powered through a LM1117 3v3 regulator on the 7v so it is isolated from the motor and DSP circuitry.
The CAN transceiver appears to fail when I unplug the micro-d connector while it is still powered, but I can't get it to fail when I have the scope connected to measure CAN differential voltage and CANH to grd voltage.
The times it has failed, the transceiver appeared to still be able to receive frames as I could measure a signal on the RX pin of the DSP but the TX side only responded with ACK and nothing appeared on the bus. Replacing the transceiver fixed it, but it's not practical to keep doing that. revH shows the first CAN setup, revRC shows the latest setup, but both still have the same problem.
Ideally I want to be able to make it fail at my will and then I can find ways to protect against it.
Thanks,
Jules
I am currently working on improving motor controller boards used to drive a 60V/4Amp BLDC motor on an oil exploration tool. The setup is as follows; 60v and CANH/CANL connect to the board through a micro-d connector, the 60v is stepped down with a switching power supply to 3v3, 7v and 12v. The CAN transceiver is powered through a LM1117 3v3 regulator on the 7v so it is isolated from the motor and DSP circuitry.
The CAN transceiver appears to fail when I unplug the micro-d connector while it is still powered, but I can't get it to fail when I have the scope connected to measure CAN differential voltage and CANH to grd voltage.
The times it has failed, the transceiver appeared to still be able to receive frames as I could measure a signal on the RX pin of the DSP but the TX side only responded with ACK and nothing appeared on the bus. Replacing the transceiver fixed it, but it's not practical to keep doing that. revH shows the first CAN setup, revRC shows the latest setup, but both still have the same problem.
Ideally I want to be able to make it fail at my will and then I can find ways to protect against it.
Thanks,
Jules