Oh good. Suggestions worked.
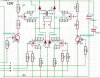
H bridges use 4 transistors, FETS or IGBT's and route a single unipolar power source to a load, typically a motor, that allows up to 4 functions: CW, CCW, brake and coast.
H bridges use 4 transistors, FETS or IGBT's and route a single unipolar power source to a load, typically a motor, that allows up to 4 functions: CW, CCW, brake and coast.