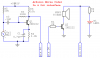
Found a sketch and adjusted it a tiny bit. Changed the mic pre amp and audio output.
Want to add a rotary encoder to set the speed (wpm). Perhaps someone will help me with that. (hint hint)
Also plan to add a backpack LCD 16x2 display. Is that a bad idea for this project?
morse_1_analog.ino
note: This is a plain textfile. It is safe to read.

Want to add a rotary encoder to set the speed (wpm). Perhaps someone will help me with that. (hint hint)
Also plan to add a backpack LCD 16x2 display. Is that a bad idea for this project?
morse_1_analog.ino
note: This is a plain textfile. It is safe to read.
Attachments

Last edited:
")
