Right, my gearbox arrived today. A few observations;
It's a very fast gearbox, I've built it in the lowest ratio configuration. Without PWM this will be more than sufficient. PWM would allow the next ratio to be used, I think the top two will be useless for robotics.
The gearbox is a strong unit, so it should be able to take a more powerful motor.
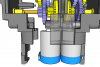
Now the good bit, if you were to remove everything to the left of the red line in my attachment you would be left with a flat bulkhead with holes in it. This would be easy to adapt to take a larger motor (with bracket and suitable gear).
Having said this, the gearbox and motor combo is already impressively fast and powerful.
It's a very fast gearbox, I've built it in the lowest ratio configuration. Without PWM this will be more than sufficient. PWM would allow the next ratio to be used, I think the top two will be useless for robotics.
The gearbox is a strong unit, so it should be able to take a more powerful motor.
Now the good bit, if you were to remove everything to the left of the red line in my attachment you would be left with a flat bulkhead with holes in it. This would be easy to adapt to take a larger motor (with bracket and suitable gear).
Having said this, the gearbox and motor combo is already impressively fast and powerful.