HI every one
I Want to use A cheap rc car (transmitter & reciver) to control A Small robot
the problem is due to high power source i want to use(gp 7.2v 1600 mA battery)
which the two H-bridge circuits , the reciver chip shown in the circuit below aren't able to
handle that much current
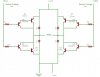
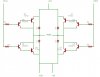
so how to make the reciver circuit only control more powerfull h-bridge ( a tip's 102 & 107 or
mosfet transistors) provided that each circuit uses it own source of power
reciver circuit operating at 9v (6 aa batteries) 600 ma & a tip's or mosfet H-bridge operating at
7.2v 1600 ma
the reason that i want seperate sourcres of power is that im afraid that the reciver chip
aren't able to handle that much current (it mighty get fried)
should i use the ouput of the rc reciver h-bridge to control the tip's/mosefet h-bridge
if this is possible how ? i'm using a Mabuchi motor for throttle
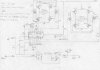
included the reciver circuit,
I Want to use A cheap rc car (transmitter & reciver) to control A Small robot
the problem is due to high power source i want to use(gp 7.2v 1600 mA battery)
which the two H-bridge circuits , the reciver chip shown in the circuit below aren't able to
handle that much current
so how to make the reciver circuit only control more powerfull h-bridge ( a tip's 102 & 107 or
mosfet transistors) provided that each circuit uses it own source of power
reciver circuit operating at 9v (6 aa batteries) 600 ma & a tip's or mosfet H-bridge operating at
7.2v 1600 ma
the reason that i want seperate sourcres of power is that im afraid that the reciver chip
aren't able to handle that much current (it mighty get fried)
should i use the ouput of the rc reciver h-bridge to control the tip's/mosefet h-bridge
if this is possible how ? i'm using a Mabuchi motor for throttle
included the reciver circuit,